
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
一种无衔铁式电磁抛载系统设计与试验研究*
引用本文
沈璐, 夏宇铭, 王肖闯, 陈健梅, 董永军, 郭景富. 一种无衔铁式电磁抛载系统设计与试验研究* [J]. 电器与能效管理技术, 2020(4): 42-46.
SHEN Lu, XIA Yuming, WANG Xiaochuang, CHEN Jianmei, DONG Yongjun, GUO Jingfu. Design and Experimental Research of Electromagnetic Jettison System Without an Armature[J]. ELECTRICAL & ENERGY MANAGEMENT TECHNOLOGY, 2020(4): 42-46.
Doi:10.16628/j.cnki.2095-8188.2020.04.008
Permissions
SHEN Lu, XIA Yuming, WANG Xiaochuang, CHEN Jianmei, DONG Yongjun, GUO Jingfu. Design and Experimental Research of Electromagnetic Jettison System Without an Armature[J]. ELECTRICAL & ENERGY MANAGEMENT TECHNOLOGY, 2020(4): 42-46.
Doi:10.16628/j.cnki.2095-8188.2020.04.008
Copyright©2020, 《电器与能效管理技术》编辑部
《电器与能效管理技术》编辑部 所有
一种无衔铁式电磁抛载系统设计与试验研究*
作者简介:
沈 璐(1984—),女,博士研究生,讲师,研究方向为智能计算和仪器开发。
夏宇铭(1996—),男,硕士研究生,研究方向为机器人控制。
王肖闯(1992—),男,硕士研究生,研究方向为嵌入式硬件及海洋技术。
摘要
设计了一种新型无衔铁式电磁抛载系统,实现拖曳式水下剖面浮标的浮力自补偿调节功能。通过对电磁铁结构进行理论分析与计算,确定了直流螺管式电磁铁的设计参数,并设计了无衔铁式电磁铁样机。基于对电磁铁的供电特性分析,设计了简单可靠的功率触发电路。经过对装置样机的多次试验测试与分析,结果表明设计满足抛载要求,验证了设计方案的可行性。相比衔铁式电磁铁抛载系统,装置具有结构简单、低功耗、易于密封等优点,可用于小型拖曳浮标系统的浮力调节,可为其他水下设备的抛载系统设计提供参考。
关键词:
拖曳浮标; 浮力调节; 电磁抛载; 触发电路
中图分类号:TM46
文献标志码:A
文章编号:2095-8188(2020)04-0042-05
doi: 10.16628/j.cnki.2095-8188.2020.04.008
Design and Experimental Research of Electromagnetic Jettison System Without an Armature
Abstract
A novel electromagnetic jettison system without an armature was developed to resolve and complete the self-compensating buoyancy regulation of the towed marine profile buoy.In this paper,the design parameters of DC plunger electromagnet were determined through the theoretical analysis and calculation of the electromagnet structure,and the simple and reliable power trigger circuit was designed according to the analysis of the power supply characteristics of the electromagnet.Then,multiple experiments of the prototype were done to test its performance.The results show that this design meets the requirements,which verifies the feasibility of this proposal.In conclusion,comparing with the electromagnet with an armature,the proposed device has many advantages,such as simple structure,low power consumption,easily sealing,and so on.Therefore,it can be applied for the buoyancy regulation of small-scale towed buoy and also can provide references for the jettison system of other underwater equipments.
Keyword:
towed buoy; buoyancy regulation; electromagnetic jettison; trigger circuit
0 引言
浮标作为海洋资源环境监测的重要设备, 已逐渐成为海洋资源调查、环境监测的主要数据来源之一, 在海洋经济以及国防安全领域发挥了极其重要的作用。我国早已加大对浮标装备领域的研发力度, 相关技术已达到国际先进水平[1], 但总体水平有待进一步提高。在极地监测领域, 我国自主研发的拖曳式海洋剖面测量浮标已成功应用于北极气象与水文数据监测[2, 3], 获得了大量宝贵数据, 实现了北极浮冰漂流沿线冰面气象数据与冰下水文数据的长期连续无人值守监测。该类浮标的运行情况表明, 诸如低温、冰冻、能源补给、浮力调控、水动力等相关技术有待进一步解决。因此, 开展拖曳浮标关键技术的研究工作, 对于此类浮标的推广应用具有非常重要的意义。
拖曳式海洋剖面浮标的电缆作为电源供给与数据通信的主要载体, 其浮力随时间、深度、水温、盐度等变化而变化, 对于轻量化浮标本身的运动具有非常重要的影响。尤其是浮标布放初期, 电缆压缩量较小、浮力较大。随着时间的推移, 电缆压缩量增加、浮力减小。当浮力减小到一定程度, 在海流的作用下, 浮标的运行将受到严重影响。此外, 电缆护套的吸水率将进一步加剧该现象的产生。浮标中常用的油囊式浮力调控系统尽管可以通过增大油囊容量完成浮力的在系统调节, 但其调节范围十分有限, 而且在浮力变化较大的情况下, 单纯增加油囊容量将导致浮标结构和控制算法的进一步调整, 无疑会增加制造成本以及控制复杂度。抛载作为一种水下设备浮力调节方式, 将其应用于拖曳式海洋浮标, 可以在不改变浮标内部结构的情况下实现浮力调节。目前的水下抛载技术主要针对不同的用途进行开发, 具有一定的技术与作业局限性[4], 而且鲜有针对水下浮标的应用。电磁控制技术作为一种较为成熟的技术, 将其应用于水下设备的抛载系统, 具有结构简单、性能可靠、功耗低、实时触发等优点。但是, 常规的电磁式水下抛载系统主要依赖衔铁的直线位移打开释放锁[4, 5], 从而释放压载。此类装置的电磁铁部分通常具有机械运动结构, 其集成与密封均具有较高难度, 而且会显著增加设计制造成本。因此, 将电磁抛载技术应用于水下浮标有待进一步调整和优化相关结构的设计。
本文根据拖曳式海洋剖面浮标的浮力调节要求, 提出了一种应用于水下浮标的新型无衔铁式电磁抛载方案。基于工程电磁学理论, 设计了仅由线圈和铁心构成的螺管式电磁铁结构, 电磁铁本身不存在机械运动衔铁, 仅依靠线圈产生的电磁场与压载中永磁体磁场间的同性相斥原理来释放压载, 避免了传统电磁铁结构中衔铁的直线运动对浮标本身结构和运动产生的冲击影响以及集成与密封问题。本文分析了无衔铁式电磁铁结构设计参数对其性能的影响, 通过理论分析与计算确定了相关设计参数, 结合现代电力电子技术, 设计了基于超级电容器和功率MOSFET管的触发电路。最后通过多次试验比对分析, 确定了相关设计参数, 并进一步验证了工作可靠性, 从而确保该系统满足设计要求。
1 抛载原理
为补偿拖曳电缆因水压形变而导致的浮力变化, 拖曳式海洋剖面浮标的抛载装置主要挂载于水下浮标部分。考虑到尽可能减小附加装置对水下浮标主体结构设计的影响, 抛载装置应具备小型化、便携性、工作可靠、耐水压等优点。电磁铁作为一种将电磁能转换为机械能的电磁装置, 具有结构紧凑、响应迅速、性能可靠、可控性强等优点, 是用于抛载系统设计的理想选择。直流电磁铁因所建立的磁通是不会随着时间作周期性变化的恒定磁通, 因而在直流电磁铁的磁导体中不会产生涡流损耗, 可以采用整块的磁导体, 便于设计加工。
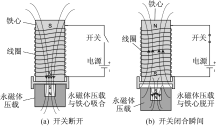
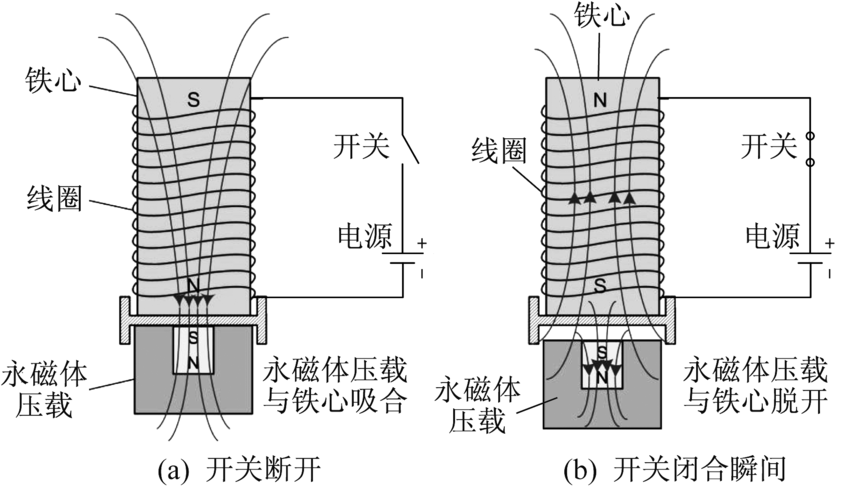
考虑到结构的简化以及轻量化设计要求, 本文设计的直流无衔铁式电磁抛载装置主要包括线圈、铁心、永磁体压载、开关、电源等部分, 无轭铁圈。无衔铁式电磁抛载工作原理如图1所示。当开关断开时, 线圈不通电, 铁心磁化磁场方向与永磁体压载磁场方向相同, 永磁体压载受到铁心吸力而不脱落, 如图1(a); 在开关接通的一瞬间, 线圈通电产生与永磁体压载磁场方向相反的电磁场, 永磁体压载受到通电线圈产生的电磁斥力, 当该电磁斥力足以克服永磁体对铁心的吸力时, 便可释放永磁体压载, 从而实现主动式电磁抛载功能, 如图1(b)所示。
 | 图1 无衔铁式电磁抛载工作原理 |
2 抛载系统结构设计
无衔铁式电磁抛载系统的性能主要取决于铁心材料、电磁铁结构以及触发电路响应特性等。根据设计要求, 本文设计的用于小型拖曳式海洋剖面浮标的抛载系统应具备0.4 kg的抛载能力。因此, 需要选择合适的铁磁材料, 优化其结构设计参数, 提高触发电路响应特性, 从而满足其工作性能。
2.1 铁心的选择
铁心的导磁能力取决于磁性材料的磁导率μ 。根据磁导率的符号和大小, 磁性材料又可分为三类, 即逆磁性(μ < 1)、顺磁性(μ > 1)以及强磁性(μ > > 1)。其中, 顺磁性物质中各分子磁矩排序杂乱无章, 合磁矩为零, 对外不显磁性。一旦把顺磁性物质放入外磁场中, 在外磁场的作用下物质中分子就会排列规则, 且分子磁矩方向与外磁场几乎相同, 从而使总磁场增强。强磁性物质可以理解为顺磁效应更强的物质, 其磁导率最大能达到数十乃至数百万, 这类物质中使用最广泛的就是铁及其氧化物, 以及铁的合金, 即铁磁物质[6]。
铁磁物质的选择主要考虑其饱和磁感应强度、矫顽力、磁导率、居里点、磁滞回线、磁滞损耗以及涡流损耗等。常用磁性材料通常分软磁材料和硬磁材料两种, 矫顽力较小的称为软磁材料, 这类材料导磁性较好, 而且涡流损耗和磁滞损耗(合称铁损耗)小, 在外磁场中容易被磁化并且剩磁容易消除, 对试验的准确度影响较小。而硬磁材料矫顽力大、磁滞效应明显且不容易消磁, 不适合做电磁元件的铁心, 但可以制成永久磁铁。综合考虑铁磁材料的相关特性, 本文所设计电磁铁的铁心采用软磁材料。对于直流电磁铁, 因直流无磁滞和涡流损耗, 铁心本身损耗小, 故可采用圆柱形工业纯铁。
2.2 电磁铁参数计算
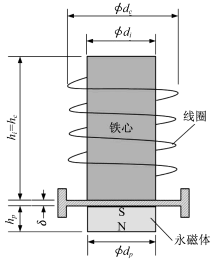
为便于分析, 该装置的作用过程可以理解为无衔铁式电磁铁与永磁体间的斥力克服铁心与永磁铁间的吸力的过程, 即Fr=Fa。在满足抛载性能的情况下, 考虑到电磁铁结构设计的简化, 本文采用经验公式与试验研究相结合的方式对无衔铁式电磁铁进行参数设计与分析。根据体积最小化以及载荷设计要求, 铁心采用工业纯铁, 永磁体采用钕铁硼NdFeB系列的N35。电磁铁部分的结构示意图如图2所示, 电磁铁设计给定的结构参数如表1所示。由于设备浸泡在海水中, 散热性较好, 故对于电磁力的理论计算, 可以不考虑线圈通电产生的温升对线圈磁势及导磁材料磁阻的影响, 忽略导磁材料的磁滞效应, 假定材料均匀且各向同性。
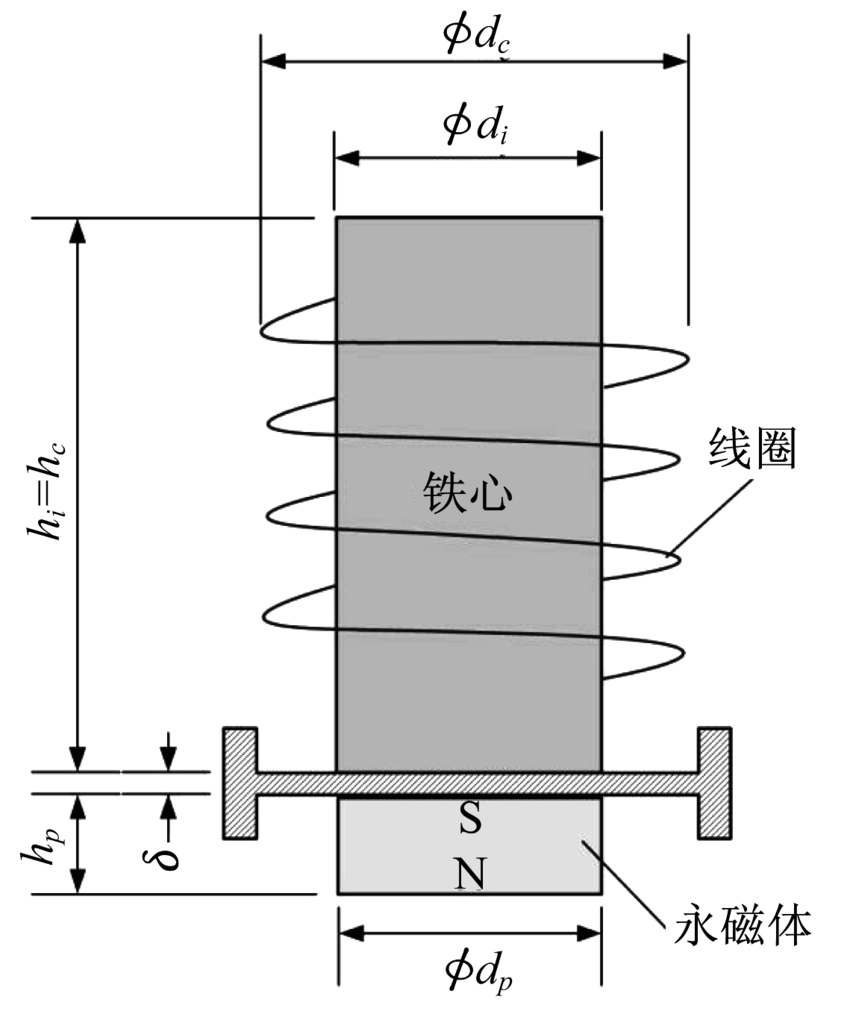 | 图2 电磁铁部分的结构示意图 |
| 表1 电磁铁设计给定的结构参数 |
考虑到漏磁等因素, 永磁体与铁心间的磁吸力可近似用麦克斯韦公式表示为[7, 8, 9]
式中: Fa— — 所需电磁吸力;
Bp— — 永磁体与铁心作用面处的磁感应强度;
Ap— — 永磁磁路有效横截面积;
μ 0— — 真空磁导率;
a— — 修正系数, 随间隙大小递增, 通常取3~5。
根据磁路计算的基本公式[10], 磁感应强度可表示为
其中, 真空磁导率μ 0=4π × 10-7 H/m, 矫顽力Hc=890 kA/m。永磁体剩磁感应强度Br=1.25 T, 永磁的相对磁导率μ r=Br/(μ 0Hc)=1.124, 结合表1的相关数据, 则有Bp=0.343 T。磁路有效截面积Ap=π
电磁悬浮方式的电磁斥力可表示为[11]
式中: IN— — 电磁铁的安匝数, I为线圈电流, N为线圈匝数;
Ai— — 电磁磁路有效横截面积。
根据表1, Ai=π
电磁铁工作状态下, 电流通过励磁线圈产生磁势, 要使产生的磁势满足前面所计算出的安匝数, 就要建立电压方程。对于直流电磁铁, 线圈电压方程为
其中, D=(dc+di)/2, qe=π
式中: Rx— — 线圈电阻;
qe— — 导线截面积;
ρ e— — 导线相应温度电阻率, 已知铜导线在105 ℃时取2.23× 10-8 Ω · m;
D— — 线圈平均直径。
根据上述分析以及表1的设计参数可知, qe≈ 0.035 mm2, 从而有线圈电压为13.9 V。
电磁铁的工作状况有长时间工作制、反复短时工作制、短时工作制三种[8]。由于线圈内阻的影响, 电磁铁的工作时长直接影响线圈导线的发热程度。为了防止线圈因过热而烧毁, 需要根据不同的工作制来规定线圈导线的容许电流密度。直流供电情况下, 为实现快速抛载, 通电时间必须尽可能短, 采用短时间工作制, 线圈导线电流密度j取15 A/mm2, 导线所允许电流I= jqx≈ 0.525 A, 线圈匝数N≈ 1 103。电磁铁设计的理论计算参数如表2所示。
| 表2 电磁铁设计的理论计算参数 |
2.3 触发电路
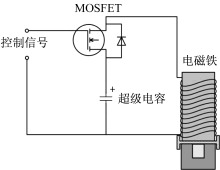
为实现有效抛载, 必须保证给电磁铁通电瞬间, 线圈中流过足够大的电流, 这样电磁铁才能产生足够大的电磁斥力来克服永磁体与铁心间的吸力。本文设计的触发电路中供电电源采用超级电容, 控制开关采用功率开关管IRF540, 控制开关接收浮标主控电路的控制信号完成电磁铁线圈的电源通断功能。超级电容功率密度高、超低温特性好、瞬间大电流放电能力超强, 完全满足电磁铁导通瞬间所需的大电流。功率MOSFET具有驱动电路简单、功耗低、开关速度快等优点。两者结合构成的触发电路不仅可以简化电路结构, 更重要的是可以提高控制电路的可靠性。抛载系统电路结构如图3所示。
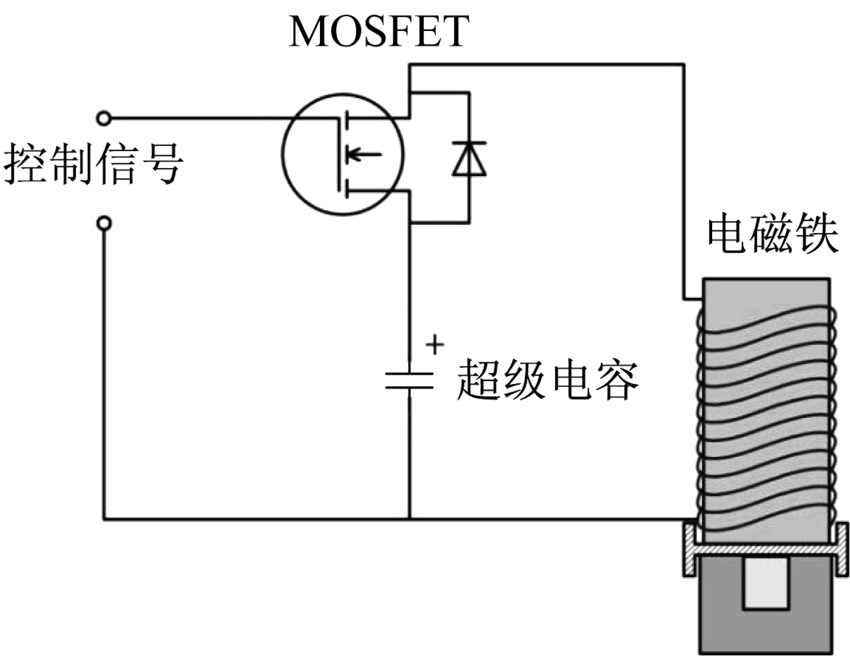 | 图3 抛载系统电路结构 |
3 试验分析
3.2 试验测试与分析
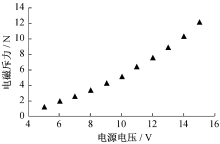
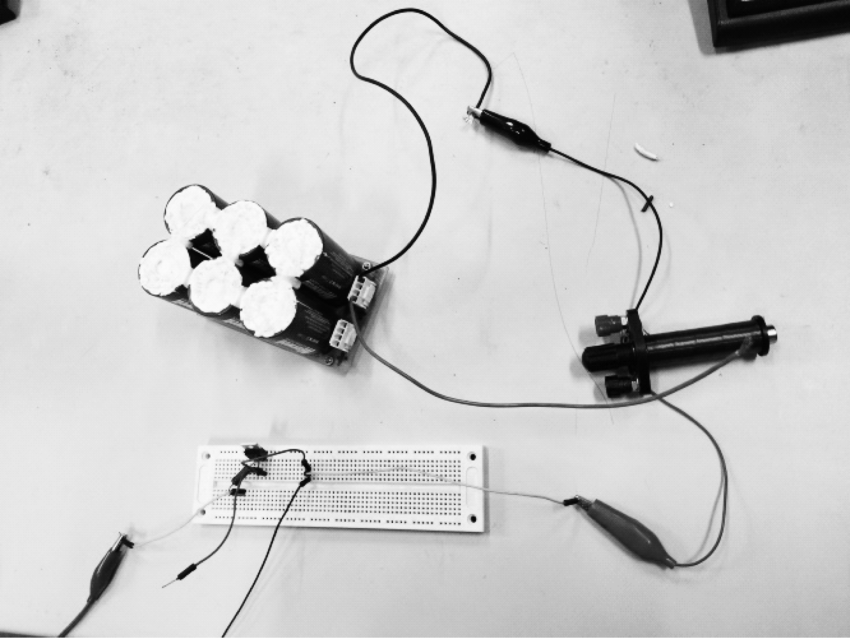
基于图4的测试装置, 分别调整无衔铁式电磁铁的线圈匝数、电源电压进行电磁铁特性测试。线圈匝数一定的情况下, 电磁斥力随电源电压的变化情况如图5所示。
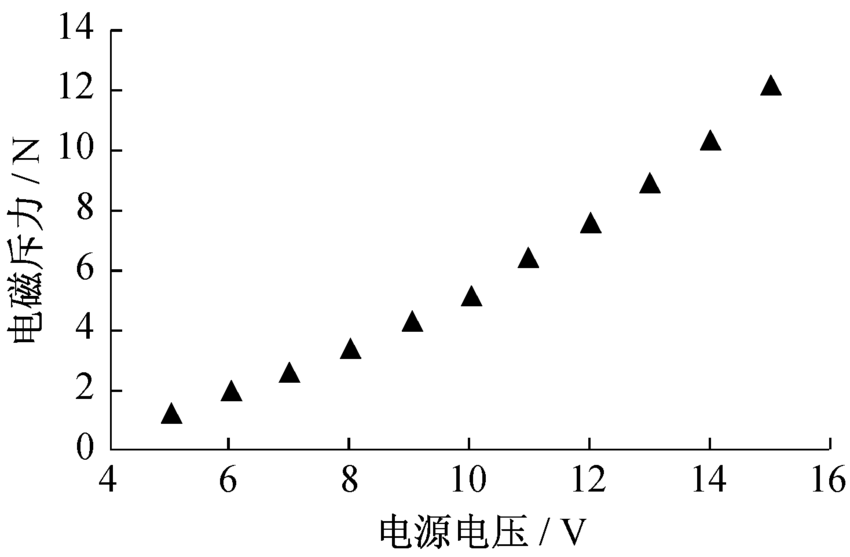 | 图5 电磁斥力随电源电压的变化情况 |
由图5可知, 为了保证抛载时能够提供足够的电磁斥力, 电磁铁的电源电压应高于14 V, 即所设计电磁铁的安匝数应高于580 A。实测电源电压高于13 V的情况下, 样机就可以完成抛载动作。因所设计浮标系统的电源电压为14.8 V, 抛载系统中超级电容的充电电源来源于浮标系统电源, 所以样机测试电源采用14.8 V电压, 则实际安匝数高于580 A。电源电压维持不变的情况下, 电磁斥力随线圈匝数的变化情况如图6所示。
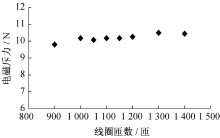
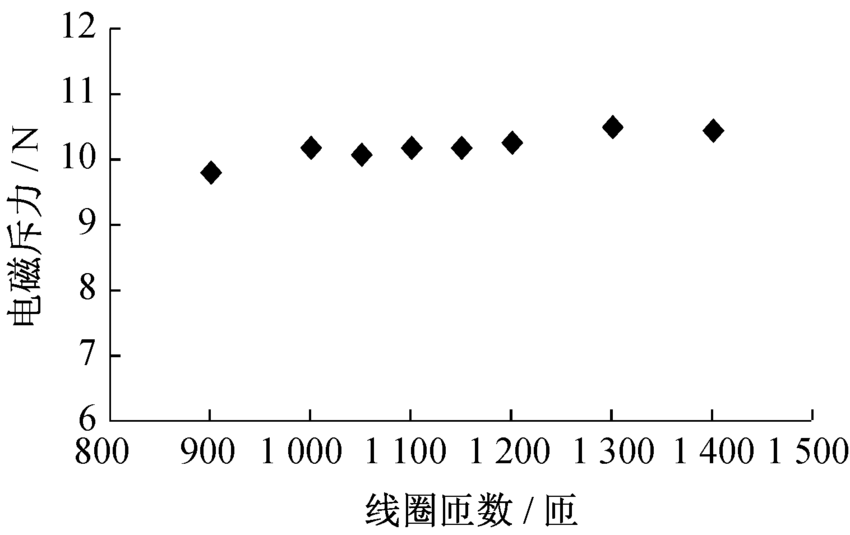 | 图6 电磁斥力随线圈匝数的变化情况 |
由图6可见, 由于线圈电源电压保持14.8 V不变, 即电磁铁的安匝数不变, 在改变线圈匝数的情况下, 线圈电阻发生变化, 线圈电流也随之变化, 但电磁力基本维持在约10 N。试验过程中发现, 线圈匝数为900匝时也能够实现抛载功能, 只是经过多次试验后, 线圈略微发热, 主要因为电流增加的缘故。基于表1给出的设计参数, 综合考虑抛载系统自身的质量, 最终确定所设计电磁铁的线圈匝数为1 100匝。经过大量试验测试, 结果表明所设计样机均可实现0.4 kg压载的可靠释放。
4 结语
本文针对水下拖曳式海洋剖面浮标的浮力调节功能, 基于工程电磁学理论与现代电力电子技术, 设计了一种直流无衔铁式电磁抛载装置。该装置中的电磁铁本身无机械运动衔铁, 结构简单、工作可靠、易于密封。通过理论分析与计算所设计的模型样机, 在经过多次试验测试与参数调整后, 优化了结构设计参数, 试验结果完全满足设计要求, 充分验证了设计方案的可行性。该装置不仅适用于小型拖曳浮标系统的浮力自补偿调节, 而且也可为相关水下设备的抛载系统设计提供参考。后续的研究将针对该装置的整体结构做进一步优化设计, 采用环氧树脂胶进行密封处理, 深入研究抛载装置的安装、耐压、抗腐蚀等问题。
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|